Weld-Path1
Overview
Strain correction of the welding line due to thermal expansion is an
indispensable
function for robot welding.
WeldPath-1 eliminates this strain and achieves welding along the correct welding line.
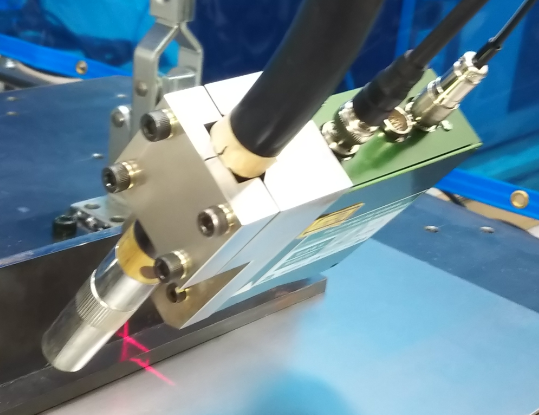
Strain correction of the welding line due to thermal expansion is an indispensable function for robot welding. WeldPath-1 eliminates this strain and achieves welding along the correct welding line. When welding according to the teaching (teaching) point, advance the torch as taught to the first point, project a line laser to a point several centimeters away from there (red line on the left in the figure below), and with respect to the welding direction (Z coordinate). The cross section (X, Y coordinates) is imaged with a camera and the coordinate values are measured (optical cutting method). This allows you to correct the point coordinate values in real time. For a V-shaped groove, find the center point PC from P0 (left turn point) and P1 (right turn point).
At this time, P0 and P1 can be obtained from the shape of the cross section of the groove. The coordinate values are calculated from the image by taking the red light projected from the laser with a camera. Note 1) Applying this method to teaching enables direct teaching.
Optical cutting method in corner walls
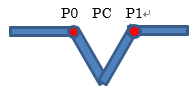
V-shaped bevel weld line
Please refer to the figure below. The figure in the middle is a cross-sectional view of the V-shaped
groove with a line laser (the laser that irradiates the red line in Fig. 1) (actually, it is taken from
diagonally forward).
Map this camera image and measure the dimensions. The laser box in Figure 1 contains a line laser
and
a micro camera.
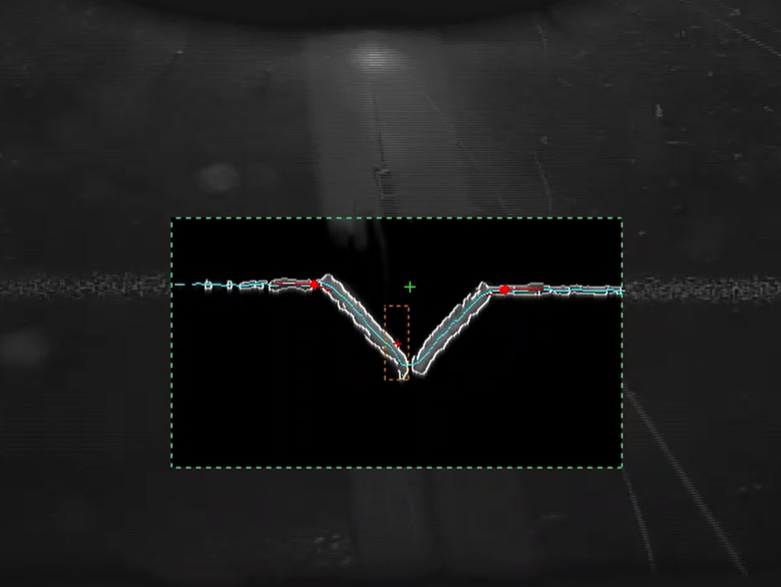
V-shaped bevel cross section
Video of V-shaped bevel cross section
Catalog Download
WeldPath Catalog Download is here.